半機械蟑螂(Cyborg Cockroach)
簡單來說,這是透過在活體蟑螂身上安裝電子背包,來達成遠端控制生物移動的實驗。
1. 它是如何運作的?
這套系統的核心在於「欺騙」蟑螂的感官。研究人員通常會將微小的電極植入到蟑螂的觸角(Antennae)神經中:
轉向控制: 蟑螂利用觸角來感測障礙物。當電子背包向左邊觸角發送微弱電脈衝時,蟑螂會以為左邊撞到了牆,於是自動向右轉。
神經刺激: 透過無線訊號(如藍牙),操作者可以像玩遙控車一樣,指令蟑螂前進或轉彎。
2. 為什麼選擇蟑螂?
作為一名對系統優化和硬體性能有興趣的開發者,你可能會欣賞蟑螂作為「硬體載體」的優點:
極低功耗: 生物本身會自己尋找食物(能源),機器人部分只需要負擔通訊和微量電擊的電力。
高環境耐受性: 蟑螂可以穿過狹小的縫隙、耐受輻射與高壓,這是純機械機器人很難做到的。
自我修復: 生物具備基本的傷口癒合能力。
3. 這項技術的用途
目前這類研究(例如由北卡羅來納州立大學或日本理化學研究所 RIKEN 所主導的專案)主要目標在於:
災難搜救: 在地震倒塌的建築廢墟中,背負感應器(麥克風或熱顯像儀)的半機械蟑螂可以鑽進縫隙尋找生還者。
環境監測: 在人類難以進入的危險區域進行長期的數據採集。
4. 你的視角:這就像是「硬體與生物的 API 對接」
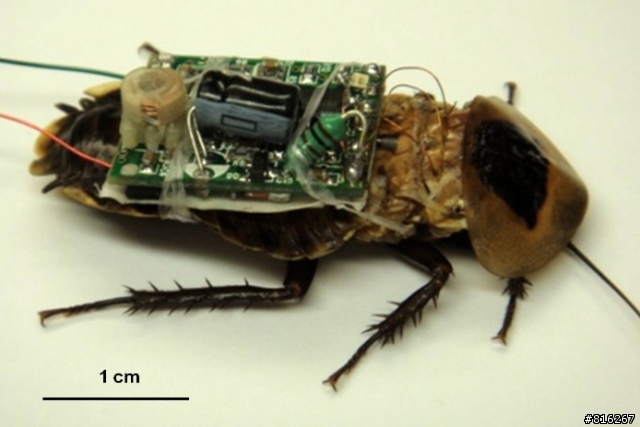
這張圖裡的電路板、電容器和接線,本質上就是將數位訊號轉換為生物神經訊號的轉接器(Adapter)。這跟你之前寫 Python 自動化腳本或處理 MUD 遊戲邏輯很像,只是這次的「控制對象」不是伺服器,而是生物神經元。
很有趣的是,近年來研究人員甚至在開發「生物燃料電池」,嘗試直接利用蟑螂體內的體液(糖分)來為背上的電路板供電,達成完全的能源自給。
1. 關鍵研究時間點
2012 年(北卡羅來納州立大學): 這是該技術最廣為人知的起點。Alper Bozkurt 教授的團隊展示了如何透過無線電背包控制「馬達加斯加蟑螂」。他們利用微弱電量刺激蟑螂的觸角(觸鬚),讓蟑螂誤以為撞到障礙物而轉向。
2015 年(德州 A&M 大學): 照片中這類更為精密的電路板配置,與德州 A&M 大學 Hong Liang 教授的研究非常吻合。他們進一步將電極直接植入到蟑螂控制腿部的神經節(Ganglion),讓控制成功率提高到約 60%。
2. 為什麼現在很少看到「這麼大」的電路板?
你照片中看到的那個電路板看起來很笨重,包含巨大的電容器和電感器。隨著技術演進,現在的研究(如 2022 年後日本 RIKEN 或新加坡南洋理工大學的成果)已經發生了巨大變化:
超薄太陽能電池: 現在的「背包」厚度僅為 4 微米(比頭髮薄 18 倍),且不需要外部充電。
高度整合: 所有的控制邏輯現在都縮小到一個比指甲還小的晶片中。
集體行動: 2025 年的最新研究已經可以讓 20 隻以上的「蟑螂大軍」集體移動,而不再是單獨控制一隻。
3. 這類研究的現況
如果現在去搜尋相關新聞,你會發現這項技術已經從「實驗室展示」轉向「實際應用」:
2025 年 3 月: 新加坡團隊在緬甸地震後的搜救行動中,首次實際部署了 10 隻帶有紅外線相機的馬達加斯加蟑螂進入瓦礫堆。